
展示会出展デモ
過去の展示会で出品したデモ内容を紹介します。Cube-Dのセットモデル単体だけではなく、PC接続、複数ボード連結、サーボモータ制御やAC100V機器制御デモも展示しました。やはり傾きセンサや動く系のデモは人気が高かったです。
水平面維持ロボ
傾きセンサでサーボモータを制御する柴犬君と基本回路は同じですが、サーボモータをベースボードに固定してベース面の傾きを打ち消すようにモータを制御することで水平面を維持するように動きます。動画中の黒い箱はモータ用の電池ボックスです。モータ固定用の白ブロックは3Dプリンタで作りました。
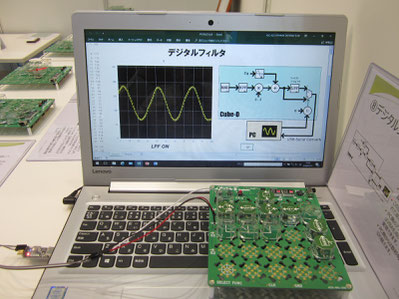
PCとの双方向接続
PCのUSBボートにUSBシリアルケーブルを接続してCube-Dと接続します。Cube-D上の回路は、SIN波とノイズを加算した値とフィルタ追加後の出力のどちらかを切り替えて出力する回路を実装しています。この選択出力をPC側に送りExcelで画面にグラフィック表示します。PC側からは定期的にフィルタのON/OFFを切り替えます。UARTは750Kbpsのボーレートに設定します。
傾きセンサ+サーボモータ
傾きセンサの2軸出力を2つのメモリに20秒ほど蓄え、繰り返し再生します。この出力をサーボモータ用のDutyパルスに変換して、2軸のサーボモータに接続します。サーボモータの電源は別電源ですが、制御信号はCube-Dと直接繋げているだけです。サーボモータに載せた柴犬君が愛嬌を振りまきます。
傾きセンサ+モータ
中央の加速度センサブロックを傾きセンサモードにして、縦軸方向の傾き角を大小比較してその結果で2つのモータのOn/Offを制御します。併せて横軸方向の傾き角を大小比較してメロディーブロックのOn/Offを制御します。これで、ボードを傾けた方向のプロペラが回り、メロディーが流れます。
※加速度センサブロックは現在量産中で、ブロック単体の販売開始は11月の予定です。もうしばらくお待ち下さい。

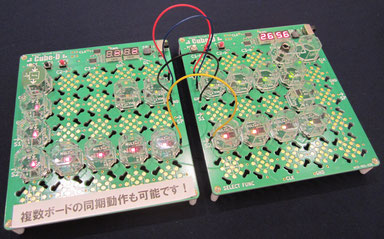
複数ボード連結
1枚のベースボードでは搭載しきれない場合には、複数枚のボードを使って回路を実装することができます。ここでは左ボードをマスタにしてCLK信号をジャンパ線(赤)で右ボードに入力し、信号線(青と黄)とGND(黒)を接続します。積分器ブロック(マルチ)出力に(LED調光+遅延)ブロックを多段接続しています。これでLEDの光が流れるようなイルミネーションが実現できます。
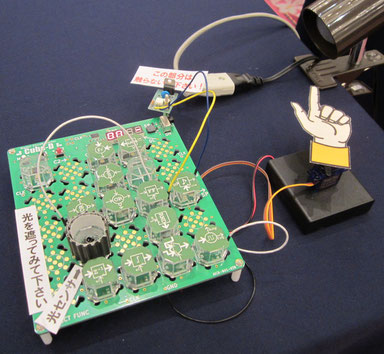
サーボモータ/AC機器
2つの回路を実装しています。
1つ目はボード下段部分のブロック群で直接サーボモータ(手首プレートの下)に接続して回転角を制御しています。2つ目は半導体リレー(別ボード、Cube-Dセットには含まれません)を使って右上のAC100V電源のスポットライトのOn/Of制御を行います。制御信号はCube-Dで作ります(光センサの光が遮断されると数秒間Onになる信号をブロックで生成)。
※展示会場はいろいろな方向からセンサに光が入り誤動作するため黒紙でセンサを覆いました。
お知らせ
■2022/03/03-04 第20回たま工業交流展に出展予定でしたが、展示会自体がコロナのため中止となりました。
■2022/02/01 本店を神奈川県川崎市に移転しました。
■2021/07/19 「プログラミング学習装置」に関する特許が登録されました
■2021/01/20- バーチャル産業交流展に出展しました(1/20-2/19)。
■2020/12/26,27 Cube-D PGを使った「短期プログラミング教室」を開催しました。
■2020/08/25 ネットショップ用ページを追加しました。
■2020/08/11 クラウドファンディングの支援者様にCube-D PGを発送しました。
■2020/08/08 Cube-D PGの全マニュアル(組立、チュートリアル、詳細)を再度更新しました。
■2020/07/21 Cube-D PGの全マニュアル(組立、チュートリアル、詳細)を更新しました。
■2020/07/08 Cube-D PGのロボットカー組立マニュアルがダウンロードできるようになりました。
■2020/06/30 Cube-D PGのチュートリアルマニュアルがダウンロードできるようになりました。
■2020/06/15 「東京技術商店」にてCube-D PGの記事が掲載されました。
■2020/06/11 クラウドファンディング(未来ショッピング)で「Cube-D PG」を公開しました。
■2020/03/28 「プログラミング学習装置」の試作機が完成しました。
■2020/03/04 「プログラミング学習装置」に関する特許を出願しました。
■2019/11/13-15 産業交流展2019に出展しました。
■2019/10/09 ブロックシールPDFがダウンロードできるようになりました。
■2019/09/12 2ブロックだけで作る回路例20を追加しました。
■2019/09/07 Cube-Dを使った論理回路実験室を追加しました。
■2019/09/03 楽天、Yahoo、ヤマダモールでCube-Dとデジタルパペットの販売を開始しました。
■2019/08/09 未来ショッピング公式ストアでCube-Dの販売を開始しました。
■2019/07/19 Makuakeストアからデジタルパペットが購入できるようになりました。
■2019/06/14 デジタルパペットのCFは目標金額の128%で終了しました。ペーパークラフトを公開しました。
■2019/05/22 デジタルパペットの取扱説明書をアップロードしました。
■2019/04/22 Makuake(クラウドファンディング)で「デジタルパペット」を公開しました。
■2019/02/03 アカデミックセット25の一般販売を開始しました(Amazon)。
■2019/01/14 アカデミック版対応操作マニュアル。回路集100をアップロードしました。
■2019/01/14 Cube-D事業を株式会社デジタルキューブに移管しました。

株式会社デジタルキューブ
〒210-0007 神奈川県川崎市川崎区駅前本町11番地2 川崎フロンティアビル4F
電話/FAX 044-813-4547 E-mail [email protected]