
ブロックだけでプログラミングする「Cube-D PG」ロボットカーを思い通りに動かそう!
小学校からプログラミングを学ぶ時代になりました。ブロック遊び感覚でいつの間にかプログラミングが身につく魅力のある教材をと考えて開発しましたが、大人も十分に楽しめる商品になりました。お子さんと一緒にプログラミングを楽しんでみませんか?
★Cube-D PGを使った短期プログラミング教室を開催しました★
Cube-D PGとは?
■特徴
- 子供から大人まで楽しめる!
- ロボットカー(組立キット)、プログラミングボード、ブロックのセット
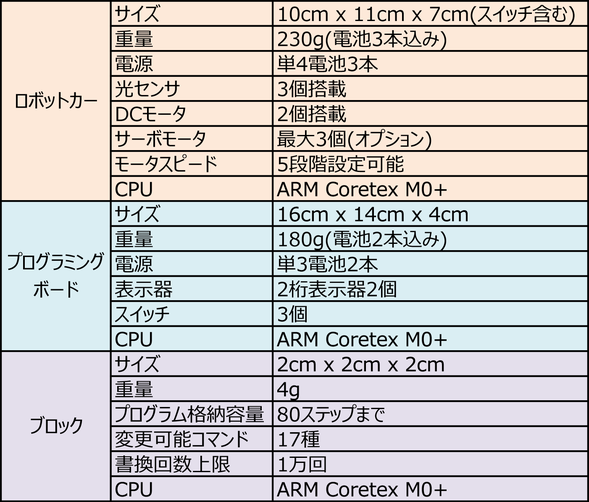
- ロボットカーは2輪駆動、光センサ3個搭載、サーボモータ3個まで搭載可能
- ブロック組合わせだけで最大80ステップ(コマンド)のプログラミングが可能
- 逐次処理だけではなく条件分岐や多重ループも使える
- プログラミングボード上でデバッグ(修正)も行える
- プログラムは1ブロックに集約でき、ロボットカーに載せると動き出す
■ロボットカー
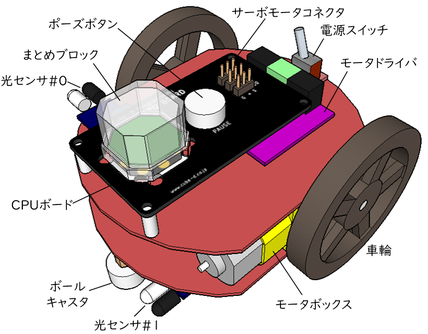
上面:車体の上面アルミプレート(全長10㎝)に、CPUボード、モータドライバ、電源スイッチ、側壁検知用の光センサ#0を取り付けます。
ドライバ1本で容易に組み立てできるキットです。プログラミングボードで作成したプログラムは「まとめブロック」に集約しロボットカーのCPUボードに取り付けます。電源を入れると「まとめブロック」内のプログラム通りに動きます。CPUボード上の白ボタンを押すとプログラムが一時停止します。
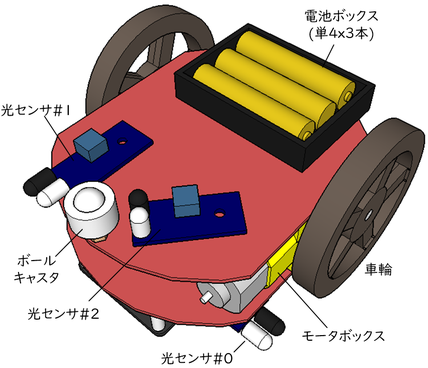
裏面:下面アルミプレートには車輪(直径6cm)付きの左右2つのモータボックスと、ボールキャスタ、電池ボックス(単4電池3本)、光センサ2つを取り付けます。
光センサ#1は前方障害物検知用、光センサ#2は床面白黒判定用です。
■プログラミングボード
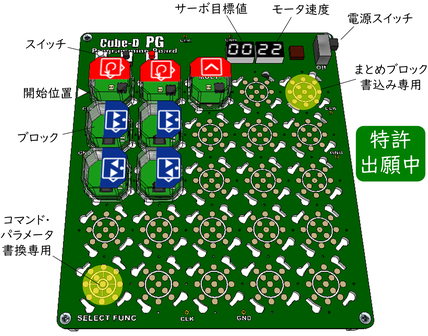
16cm x 14cmサイズで、ブロックが25個装着できます。ただし、右上は「まとめブロック」書込み専用、また左下はブロックコマンド・パラメータ書換専用です。プログラムは左上ブロックから開始し、ブロックの矢印方向に順次移っていきます。現在実行中のブロックはブロック中央のLEDが点灯します。
また、4桁表示器には、左右のモータ速度(回転方向含む)およびサーボモータ目標値が表示され、3chのセンサは3つのスイッチに置き換わります。従って、プログラミングボード上でビジュアルなデバッグが行えます。
デバッグが完了したら、ブロックを専用領域に装着して電源を入れます。するとプログラムが1ブロックに瞬時に集約されて「まとめブロック」が出来上がります。
■ブロック
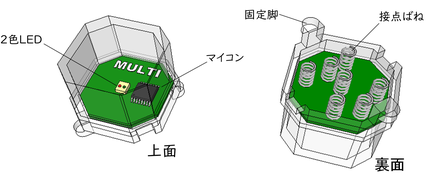
1辺が2cmのブロックで内部に小型マイコンと2色LEDを搭載します。プログラミングボードに装着することで裏面の接点ばねを介して電気的にも接続されます。前進や回転といった最小単位のコマンドがこのブロックから出力され、複数ブロックの連結で複雑な動きをプログラムできます。
コマンドは17種類あり、プログラミングボード上の簡単なボタン操作で好きなコマンドにブロックを切替可能です。ブロックのコマンドを変更した場合、機能を表すシール(再剥離可能)をブロックの上面に貼り付けます。
■コマンド

青色は左右のモータ回転方向を変更するコマンドです。2つの三角形は左右の車輪の進む方向を示しています。
赤色は処理の流れを変えるコマンド、橙色は各種設定を行うコマンドです。黒色はブロック内メモリに記録したコマンドを順番に再生するものです。まとめブロック書込み専用領域に装着時はワーク領域に装着した複数ブロックの情報を読み出してメモリに記録します(最大80コマンド)。
各ブロックにはパラメータが1つだけ設定できコマンドの種類に応じて例えばループ回数などが指定できます。
プログラミング
■手順
下の動画ににまとめてあります。
■逐次処理
正方形の枠外にある三角形が次に動作するブロックを示しています。大きな右向き三角印のある左上ブロックからスタートします。例では{前進、右回転}のセットを4回実行するループや分岐のない逐次処理です。黄色は現在の実行コマンド(ブロック)の位置を示しています。
■ループ処理
<逐次処理>の例のように複数ブロック処理を何度も繰り返す場合、ループブロックを使うとブロックの数を削減できて便利です。
例では前進と右回転のセットを4回繰返し、続いて前進と左回転のセットを4回繰り返しています(ループブロック上の数字はループ回数)。繰返し回数はループブロックのパラメータとして設定します。
■2重ループ処理
2重ループ処理を行う場合には、内側のループ処理をいったん1つにまとめ、ループブロックの下に配置します。多重ループの処理も同様です。例では、<ループ処理>の説明で使った処理をまとめてブロック化して、この「まとめブロック」のあとに前進と回転を接続して全体を外側ループで2回繰り返しています。
ループブロック上の数字は外側ループ回数、「まとめブロック」横の数字は内側ループ回数を示しています。
■条件分岐
条件分岐ブロックはセンサの検出値に応じて次に実行するブロックを切替えることができます。例では、車体の右側面の光センサ#0の検出時(右に障害物あり)に左(壁から離れる)、未検出時(障害物なし)は右(壁に近づく)に動くことで、壁に沿って移動します。
こんな動きが楽しめます!
■ライントレーサー
裏面の光センサ#2により黒ラインの境界をトレースするようにプログラムしています。
■透明虫かご
裏面光センサ#2によりラインを検知すると方向を変えるようにプログラムしています。テントウムシが虫かごの中で出口を探して動き回っているイメージです。
■臆病ねずみ
光センサで前方に障害物を検知するまで直進します。障害物を検知するとスピードを上げて逃げ出します。
■迷路脱出
光センサ#0を使った右の壁に沿って進む処理と、光センサ#1で正面に壁を検知すると左回転するようにプログラムしました。
■恐竜ロボ
2軸のサーボモータ台座に恐竜のペーパークラフト(※ 無料ダウンロード可)を載せ、恐竜が歩く様子をイメージして動きをプログラムしました。
■ロボットダンス
3個のサーボモータにそれぞれ頭、右腕、左腕を装着してロボットの上半身を作ります。タイヤの動きに合わせて腕と頭を振ってダンスを行います。
仕様
マニュアル
こちらからダウンロードしてください。
お知らせ
■2022/03/03-04 第20回たま工業交流展に出展予定でしたが、展示会自体がコロナのため中止となりました。
■2022/02/01 本店を神奈川県川崎市に移転しました。
■2021/07/19 「プログラミング学習装置」に関する特許が登録されました
■2021/01/20- バーチャル産業交流展に出展しました(1/20-2/19)。
■2020/12/26,27 Cube-D PGを使った「短期プログラミング教室」を開催しました。
■2020/08/25 ネットショップ用ページを追加しました。
■2020/08/11 クラウドファンディングの支援者様にCube-D PGを発送しました。
■2020/08/08 Cube-D PGの全マニュアル(組立、チュートリアル、詳細)を再度更新しました。
■2020/07/21 Cube-D PGの全マニュアル(組立、チュートリアル、詳細)を更新しました。
■2020/07/08 Cube-D PGのロボットカー組立マニュアルがダウンロードできるようになりました。
■2020/06/30 Cube-D PGのチュートリアルマニュアルがダウンロードできるようになりました。
■2020/06/15 「東京技術商店」にてCube-D PGの記事が掲載されました。
■2020/06/11 クラウドファンディング(未来ショッピング)で「Cube-D PG」を公開しました。
■2020/03/28 「プログラミング学習装置」の試作機が完成しました。
■2020/03/04 「プログラミング学習装置」に関する特許を出願しました。
■2019/11/13-15 産業交流展2019に出展しました。
■2019/10/09 ブロックシールPDFがダウンロードできるようになりました。
■2019/09/12 2ブロックだけで作る回路例20を追加しました。
■2019/09/07 Cube-Dを使った論理回路実験室を追加しました。
■2019/09/03 楽天、Yahoo、ヤマダモールでCube-Dとデジタルパペットの販売を開始しました。
■2019/08/09 未来ショッピング公式ストアでCube-Dの販売を開始しました。
■2019/07/19 Makuakeストアからデジタルパペットが購入できるようになりました。
■2019/06/14 デジタルパペットのCFは目標金額の128%で終了しました。ペーパークラフトを公開しました。
■2019/05/22 デジタルパペットの取扱説明書をアップロードしました。
■2019/04/22 Makuake(クラウドファンディング)で「デジタルパペット」を公開しました。
■2019/02/03 アカデミックセット25の一般販売を開始しました(Amazon)。
■2019/01/14 アカデミック版対応操作マニュアル。回路集100をアップロードしました。
■2019/01/14 Cube-D事業を株式会社デジタルキューブに移管しました。

株式会社デジタルキューブ
〒210-0007 神奈川県川崎市川崎区駅前本町11番地2 川崎フロンティアビル4F
電話/FAX 044-813-4547 E-mail [email protected]