
夏休みの工作のようですが、Cube-Dを使ってライントレーサを作ってみました。今後ホイール付きギアードモータブロックの販売を検討中です。

Cube-D開発当初からタイヤをつけてライントレーサとして動かすことを考えていました。光センサをベースボード裏面に取り付け、床面の明暗によって左右のモーターの動きを変えることによりライン上をなぞるように動かすものです。当時は、手ごろなギアードモータが見つからなかったことと、モーターをベースボードに固定する安価な方法が見つかりませんでした。

最近購入したウォームギア付きモータ(モノタロウ)を3Dプリンタで作成したマウンタ(右図)でベースボードに固定できるようにしました。モータドライバはモータブロックの基板を流用しています(リミッタ解除)。左側のマウンタの穴にはタイヤ付きのレゴブロックを差し込みます(補助輪)。

これらをベースボードの裏面に装着します。ギアードモータブロックは2つ作成します。ベースボード下に取り付けてあるのは光センサブロックです。赤外線LEDを発光させて反射して戻ってきた光量により出力の2値レベルを生成します。
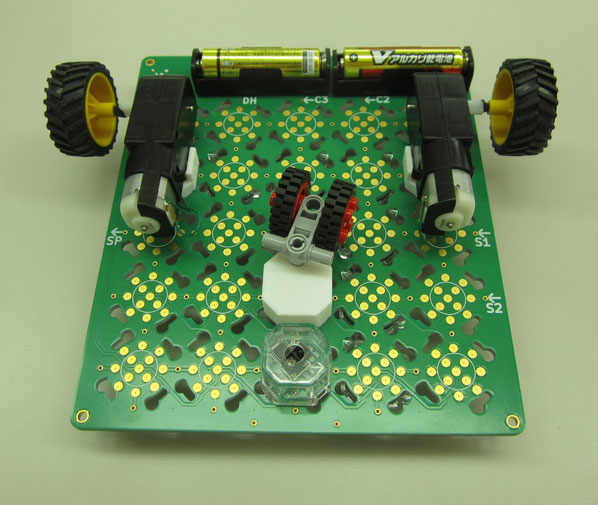
表面はこんな感じです。回路は光センサの出力をモータブロックに配っているだけです。ただし右側モータは中央のマルチブロックをインバータ機能にしてあるので極性が反転した信号となります。光センサの出力に応じてどちらか片側だけモータが回ります。動きがギクシャクしているのはそのためです。

もう少し高速にきびきび動くギアードモータと、補助輪をどうするかを検討中です。おすすめがあればお知らせ下い。
