
Digital Puppet(開発中)
デジタルパペットは、Cube-Dのサーボモータ制御回路に特化した派生品(基板+サーボモータ+電池ボックス+ペーパークラフト)です。メカとエレキ系は完成品で、付属のペーパークラフト(動物系)を作ってサーボモータにかぶせて完成します。Cube-Dでは傾きセンサでサーボモータの回転角度を決めていましたが、デジタルパペットではジョイスティックで制御します。1枚の基板で2軸サーボモータを2台まで制御できます。また、基板を連結することで複数のモータを制御できます。同一制御、反転制御、遅延制御、ランダム動作、動作の記録と再生、などが可能です。
上は、6体のパペット君をジョイスティックで動かしてみた動画です。最初は6体同じ動作、次が上下方向の動きを反転させています。次が0.1秒の遅延をつけて順次動作させています。ちょっとしたウェーブが行えます。最後が0.5[s]の遅延をつけてみた場合です。
次の動画は動作の記録と再生のデモです。記録モードでジョイスティックで20秒間動作させてから、再生モードに設定します。最初の20秒間の動作と全く同じ動きを繰り返します。
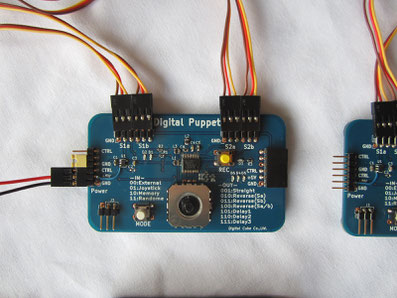
デジタルパペットのコントロール基板(試作品)です。左コネクタが電源と外部入力、上辺のコネクタ2つがそれぞれ2軸サーボモータに接続されます。中央下がジョイスティック(アナログ)、右コネクタからは電源とサーボ角度情報を出力していて、別ボードと接続することで多数の2軸サーボモータが制御できます。マイコンはCube-Dで採用したものの上位機種(LPC822)でADCを搭載しています。ジョイスティックの2軸ポジション情報をデジタル値に変換する必要があるためこの機種を採用しました。白ポタンはモード変更用、黄ボタンは動作記録用です。部品は手実装のため、はんだ付けは美しくないです。ご容赦ください。
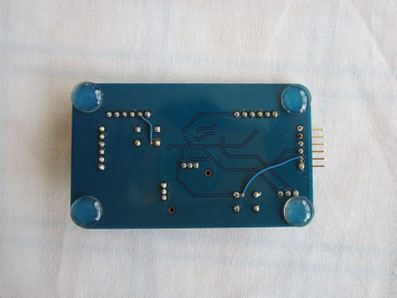
基板の裏面です。四隅にシリコンの滑り止めを張り付けてあります。ジャンパ線は設計ミスの修正のためで、量産版では直します。本商品はお子様にも楽しんでもらいたいので、現在表面にあるマイコンや面実装部品は裏面に移動する予定です。
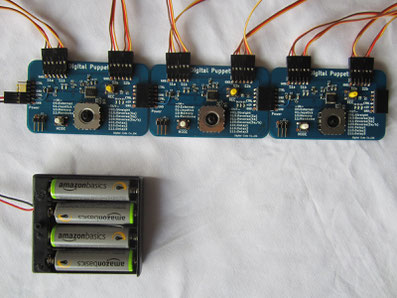
3基板を連結した状態(2軸サーボx6)です。電源は単三4本(充電池推奨)です。入力5VをLDOで3.3Vに変換してマイコンに接続します。このLDOは電源逆差しでも保護機能が働き、マイコンが破壊されることはありません。
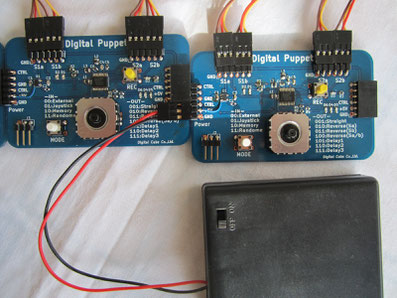
電源投入時に左コネクタからの制御信号が来ない場合にJoystick制御モードに自動で切り替わります。写真の接続の場合、電源を投入すると、一番左側基板がJoystick制御モードとなって、中央および右基板が左基板の動きに連動します。ボード間の通信はUARTで行っていますので、USBシリアルケーブルがあればPCからも簡単に制御できます。
2軸サーボ8セット(4基板連結)でも1個の電源で動作できるようです。サーボモータの数が足りずこれ以上の確認はまだできていません。
サーボモータはかなり電流を食うので、多数接続すると電源が変動します。多数接続の安定動作を考えて、左のように途中から別電源に切り替えることができるようにしてあります。
サーボモータの裏面には、耐震ジェルシートを張り付けます。かたい平らな面ならば接着剤やネジを使わずに簡単に取り付けることができます(取り外しも容易)。動作中も倒れることはありません。
お知らせ
■2022/03/03-04 第20回たま工業交流展に出展予定でしたが、展示会自体がコロナのため中止となりました。
■2022/02/01 本店を神奈川県川崎市に移転しました。
■2021/07/19 「プログラミング学習装置」に関する特許が登録されました
■2021/01/20- バーチャル産業交流展に出展しました(1/20-2/19)。
■2020/12/26,27 Cube-D PGを使った「短期プログラミング教室」を開催しました。
■2020/08/25 ネットショップ用ページを追加しました。
■2020/08/11 クラウドファンディングの支援者様にCube-D PGを発送しました。
■2020/08/08 Cube-D PGの全マニュアル(組立、チュートリアル、詳細)を再度更新しました。
■2020/07/21 Cube-D PGの全マニュアル(組立、チュートリアル、詳細)を更新しました。
■2020/07/08 Cube-D PGのロボットカー組立マニュアルがダウンロードできるようになりました。
■2020/06/30 Cube-D PGのチュートリアルマニュアルがダウンロードできるようになりました。
■2020/06/15 「東京技術商店」にてCube-D PGの記事が掲載されました。
■2020/06/11 クラウドファンディング(未来ショッピング)で「Cube-D PG」を公開しました。
■2020/03/28 「プログラミング学習装置」の試作機が完成しました。
■2020/03/04 「プログラミング学習装置」に関する特許を出願しました。
■2019/11/13-15 産業交流展2019に出展しました。
■2019/10/09 ブロックシールPDFがダウンロードできるようになりました。
■2019/09/12 2ブロックだけで作る回路例20を追加しました。
■2019/09/07 Cube-Dを使った論理回路実験室を追加しました。
■2019/09/03 楽天、Yahoo、ヤマダモールでCube-Dとデジタルパペットの販売を開始しました。
■2019/08/09 未来ショッピング公式ストアでCube-Dの販売を開始しました。
■2019/07/19 Makuakeストアからデジタルパペットが購入できるようになりました。
■2019/06/14 デジタルパペットのCFは目標金額の128%で終了しました。ペーパークラフトを公開しました。
■2019/05/22 デジタルパペットの取扱説明書をアップロードしました。
■2019/04/22 Makuake(クラウドファンディング)で「デジタルパペット」を公開しました。
■2019/02/03 アカデミックセット25の一般販売を開始しました(Amazon)。
■2019/01/14 アカデミック版対応操作マニュアル。回路集100をアップロードしました。
■2019/01/14 Cube-D事業を株式会社デジタルキューブに移管しました。

株式会社デジタルキューブ
〒210-0007 神奈川県川崎市川崎区駅前本町11番地2 川崎フロンティアビル4F
電話/FAX 044-813-4547 E-mail info@cube-d.co.jp